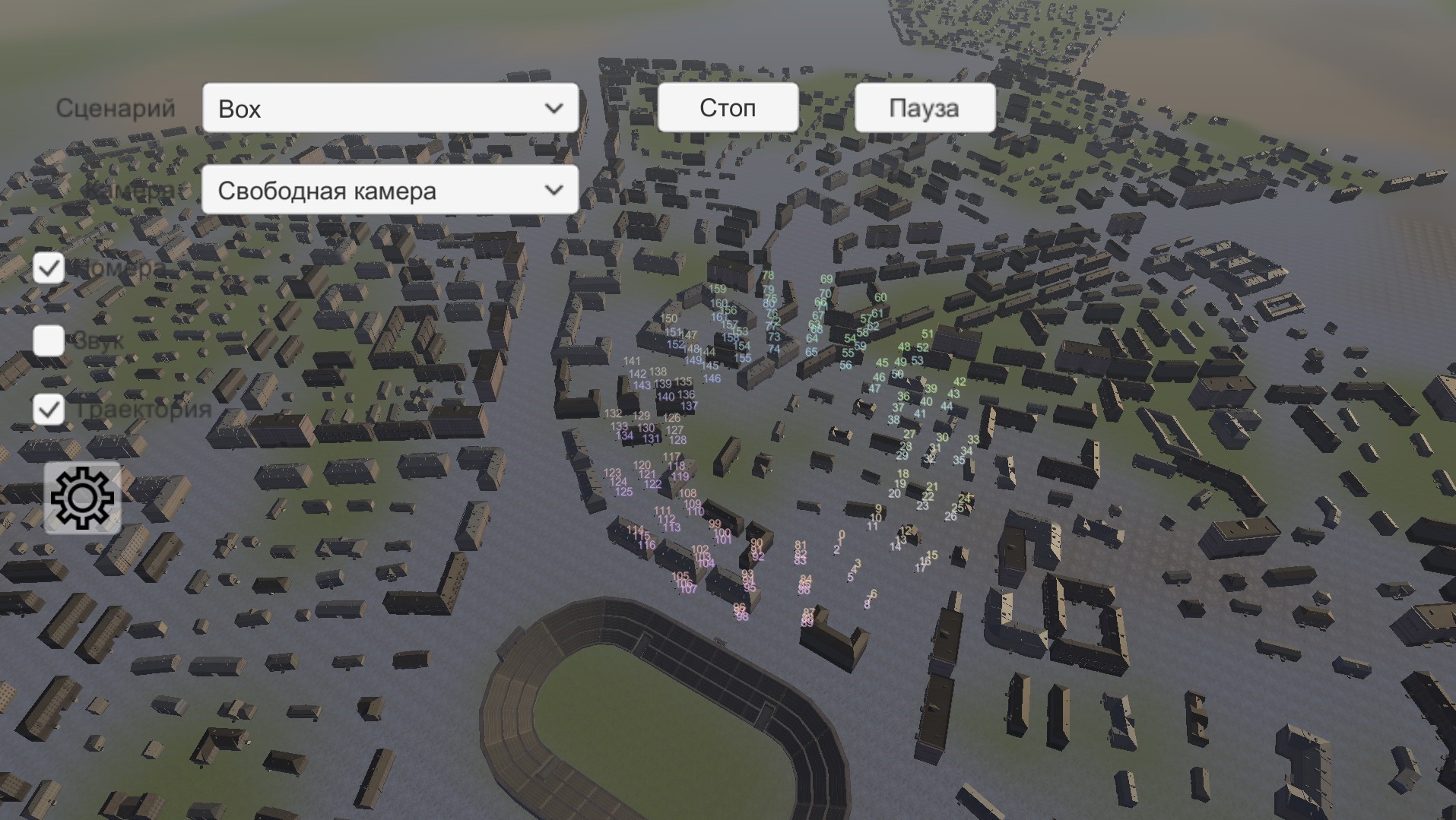

Многофункциональный программный комплекс автоматического управления беспилотными авиационными системами – СТАЯ предназначен для моделирования полета роя БВС, с использованием искусственного интеллекта, направленного на выполнение поставленной боевой задачи с учетом изменения окружающих условий и оперативных вмешательств оператора по корректировке базовой задачи.
МПК СТАЯ состоит из четырех основных программных модулей:
− модуль моделирования полетной модели БВС предназначенный для выполнения функции моделирования движения единичного БВС;
− модуль визуализации окружающего пространства, предназначенный для трехмерного моделирования ландшафта и атмосферы;
− модуль искусственного интеллекта роя БВС предназначенный для моделирования движения роя БВС;
− модуль ввода-вывода, предназначенный для интеграции и сопряжения программного комплекса с аппаратной частью.
Кроме того, программный комплекс включает дополнительные программные компоненты:
− хранилище ресурсов, содержащее базовую информацию о сценариях и ресурсах, используемых в сценариях.
− редактор карт.
− редактор сценариев.
Основные функциональные характеристиками МПК СТАЯ:
− моделирование управления малым БВС (массой от 1,0 до 100 кг);
− моделирование высоко детального ландшафта с максимальным размером карт не менее 10 тыс. км2;
− моделирование физических свойств атмосферы, формирующий различные погодные условия и обеспечивающий соответствующую работу полётной модели БВС;
− автоматическое определение положений БВС в воздухе с учетом их массы и моментов инерции относительно 3-х осей, а также сил, воздействующих на физическое тело с минимальным временным отрезком 0,01 сек;
− просчёт пространственных координат и визуализации до 5000 стационарных строений;
− просчёт параметров полёта и визуализации до 300 движущихся объектов;
− автоматическое управление группой БВС численностью до 300 шт. с использованием алгоритмов искусственного интеллекта;
− контроль заданных режимов работы, отображение состояния и параметров работы моделируемых БВС;
− выдача тревожного сообщения при достижении рабочих параметров заданного предельного значения.
На основе данного МПК СТАЯ могут быть реализованы:
- программный комплекс управления полета роя БВС в реальных условиях;
- тренажер по управлению роем БВС в реальных условиях.
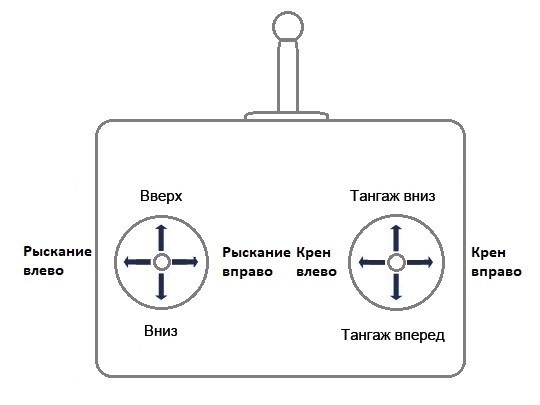
БВС управляется увеличением или снижением оборотов соответствующих пар винтов. Подъемные силы винтов создают тягу, которая используется для удержания БВС в воздухе и поступательных перемещений. Силы сопротивления создают реактивные моменты, которые активно используются для управления по углу рысканья.
Оси и кнопки джойстика могут быть перенастроены внутри МПК СТАЯ в соответствии с предпочтениями оператора. МПК СТАЯ поддерживает до 10 осей и до 16 кнопок джойстика.
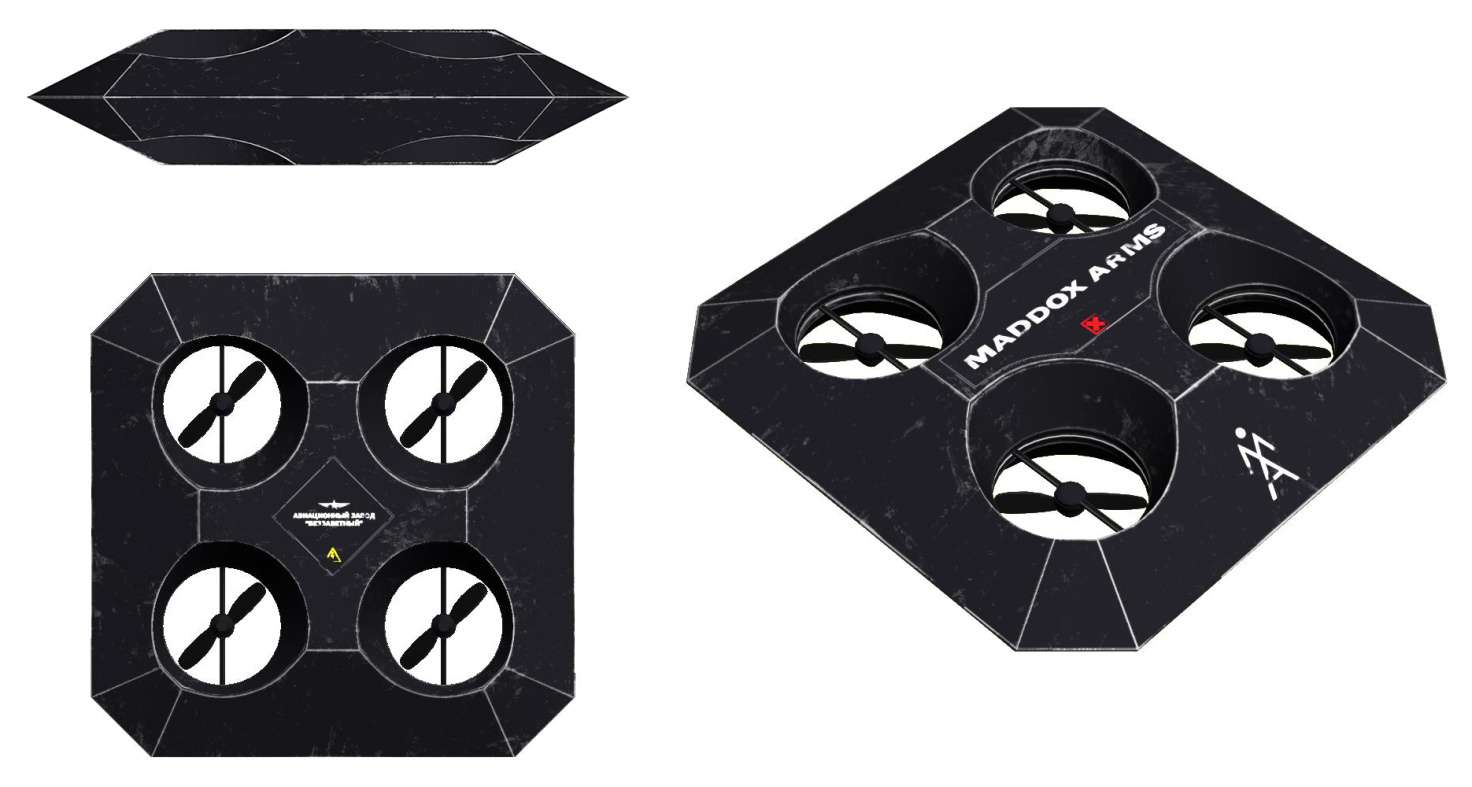
Аэродинамическая форма квадрокоптера
Тактико-технические характеристики БВС
|
Характеристика |
Значение |
|
Тип БВС |
квадрокоптер (4 винта) |
|
Максимальная скорость набора высоты |
6 м/c |
|
Максимальная скорость снижения |
4 м/c |
|
Максимальная скорость полета |
20 м/c |
|
Встроенные датчики |
GPS, ГЛОНАСС, акселерометр, датчик высоты, магнитометр, ультразвуковой датчик, оптический датчик |
|
Тип управления |
радиоканал, пульт управления |
|
Автопилот |
есть |
|
Следование по проложенному на карте маршруту |
есть |
|
Следование за оператором |
есть |
|
Возвращение в точку взлета |
есть |
|
Дальность управления |
3500 м (радиоканал) |
|
Максимальная грузоподъемность |
0,25 кг |
|
Аккумулятор |
5350 мА*час, 15.2 В |
|
Максимальное время полета |
30 мин |
|
Тип питания пульта управления |
встроенный аккумулятор |
|
Габариты, ДхШхВ |
300х300х70 мм |
|
Вес квадрокоптера |
1380 г |